Summary Lab #10
Lab #10 incorporates grid-based localization with the Bayes Filter to provide estimates of robot positions in a simulated environment. More specifically, with the Bayes Filter, a distinct framework is established for estimating the stunt car’s positions over time through control inputs and observations. By replicating the sensors and operating conditions of the stunt car within the provided, gridded simulation, controlled methods are tested such as arithmetic underflow, odometry motion models, and gaussian functions that may improve sensing performance in real-world applications.
Lab #10 Outcomes
Before beginning the main simulations, the following localization functions were completed to assist in the computation of components within the Bayes Filter:
- compute_control(cur_pose, prev_pose) - Provides an computation of the robots motion for the Bayes Filter, including the rotation towards the target (delta_rot_1), a translation to the location (delta_trans), and a final rotation aligning with the orientation (delta_rot_2).
def compute_control(cur_pose, prev_pose):
""" Given the current and previous odometry poses, this function extracts
the control information based on the odometry motion model.
Args:
cur_pose ([Pose]): Current Pose
prev_pose ([Pose]): Previous Pose
Returns:
[delta_rot_1]: Rotation 1 (degrees)
[delta_trans]: Translation (meters)
[delta_rot_2]: Rotation 2 (degrees)
"""
x_t, y_t, ang_t_deg = cur_pose
x_t1, y_t1, ang_t1_deg = prev_pose
# Convert degrees → radians
ang_t = math.radians(ang_t_deg)
ang_t1 = math.radians(ang_t1_deg)
dx = x_t - x_t1
dy = y_t - y_t1
# Translation distance
delta_trans = math.sqrt(dx*dx + dy*dy)
# Direction of motion
theta = math.atan2(dy, dx)
# First rotation
delta_rot_1 = mapper.normalize_angle(theta - ang_t1)
# Second rotation
delta_rot_2 = mapper.normalize_angle(ang_t - ang_t1 - delta_rot_1)
return delta_rot_1, delta_trans, delta_rot_2
- odom_motion_model(cur_pose, prev_pose, u) - Computes the probability of the previous position to the current position using Gaussian distributions.
def odom_motion_model(cur_pose, prev_pose, u):
""" Odometry Motion Model
Args:
cur_pose ([Pose]): Current Pose
prev_pose ([Pose]): Previous Pose
(rot1, trans, rot2) (float, float, float): A tuple with control data in the
format (rot1, trans, rot2) with units (degrees, meters, degrees)
Returns:
prob [float]: Probability p(x'|x, u)
"""
# Actual motion from odometry
dr1, dt, dr2 = compute_control(cur_pose, prev_pose)
# Expected motion from control input
dr1_hat, dt_hat, dr2_hat = u
# Gaussian likelihoods
p1 = loc.gaussian(dr1, dr1_hat, loc.odom_rot_sigma)
p2 = loc.gaussian(dt, dt_hat, loc.odom_trans_sigma)
p3 = loc.gaussian(dr2, dr2_hat, loc.odom_rot_sigma)
return p1 * p2 * p3
- prediction_step(cur_odom, prev_odom) - Computes the probability of each position the robot ends at, ignoring states with negligible belief
def prediction_step(cur_odom, prev_odom):
""" Prediction step of the Bayes Filter.
Update the probabilities in loc.bel_bar based on loc.bel from the previous
time step and the odometry motion model.
Args:
cur_odom ([Pose]): Current Pose
prev_odom ([Pose]): Previous Pose
"""
# Extract control input
u = compute_control(cur_odom, prev_odom)
cells_X, cells_Y, cells_A = mapper.MAX_CELLS_X, mapper.MAX_CELLS_Y, mapper.MAX_CELLS_A
temp = np.zeros((cells_X, cells_Y, cells_A))
# Loop over all previous states
for i in range(cells_X):
for j in range(cells_Y):
for k in range(cells_A):
if loc.bel[i,j,k] < 1e-4:
continue
prev_pose = mapper.from_map(i, j, k)
# Loop over all possible current states
for a in range(cells_X):
for b in range(cells_Y):
for c in range(cells_A):
cur_pose = mapper.from_map(a, b, c)
prob = odom_motion_model(cur_pose, prev_pose, u)
temp[a, b, c] += prob * loc.bel[i, j, k]
# Normalize
loc.bel_bar = temp / np.sum(temp)
- sensor_model(obs) - Determines the likelihood of of receiving a specific sensor reading for each possible pose
def sensor_model(obs):
""" This is the equivalent of p(z|x).
Args:
obs ([ndarray]): A 1D array consisting of the true observations for a
specific robot pose in the map
Returns:
[ndarray]: Returns a 1D array of size 18 (=loc.OBS_PER_CELL) with the
likelihoods of each individual sensor measurement
"""
prob_array = []
for i in range(len(obs)):
expected = loc.obs_range_data[i]
gauss = loc.gaussian(expected, obs[i], loc.sensor_sigma)
prob_array.append(gauss)
return np.array(prob_array)
- update_step(sensor) - Combine the predicted belief with the sensor likelihood to determine the belief distribution , which is normalized and localized to teh robot on the grid
def update_step(sensor):
""" Update step of the Bayes Filter.
Update the probabilities in loc.bel based on loc.bel_bar and the sensor model.
"""
cells_X, cells_Y, cells_A = mapper.MAX_CELLS_X, mapper.MAX_CELLS_Y, mapper.MAX_CELLS_A
for i in range(cells_X):
for j in range(cells_Y):
for k in range(cells_A):
expected = mapper.get_views(i, j, k)
p_array = sensor_model(expected)
p = np.prod(p_array)
loc.bel[i, j, k] = loc.bel_bar[i, j, k] * p
# Normalize
loc.bel /= np.sum(loc.bel)
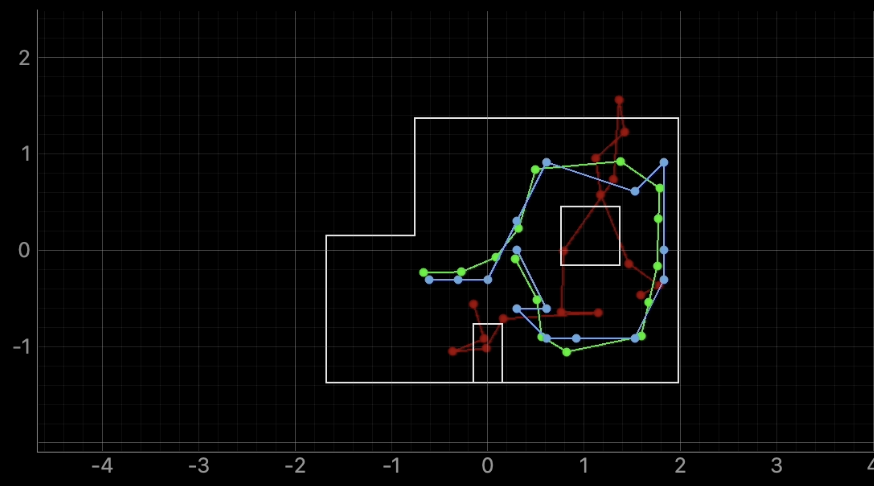
After compiling these individual functions, the simulation is copmiled with the odometry values, the Bayes Filter values, and the actual position of the stunt car in the simulation. The following is a video of the simulated running, in addition to some diagrams demonstrating a graph for the localization in the simulation:
Discussion
This lab has been a great experience to experience working with the Bayes Filter in order to continue improving stunt car localization on a grid. This proves great promise in real-world integration for better estimation of car motion. This lab was completed with Jamison Taylor, and assisted from AI tools for minor debugging.